Object Detection and Segmentation
Our study of geometric perception gave us good tools for estimating the pose of a known object. These algorithms can produce highly accurate estimates, but are still subject to local minima. When the scenes get more cluttered/complicated, or if we are dealing with many different object types, they really don't offer an adequate solution by themselves.
Deep learning has given us data-driven solutions that complement our geometric approaches beautifully. Finding correlations in massive datasets has proven to be a fantastic way to provide practical solutions to these more "global" problems like detecting whether the mustard bottle is even in the scene, segmenting out the portion of the image / point cloud that is relevant to the object, and even in providing a rough estimate of the pose that could be refined with a geometric method.
There are many sources of information about deep learning on the internet, and I have no ambition of replicating nor replacing them here. But this chapter does being our exploration of deep perception in manipulation, and I feel that I need to give just a little context.
Getting to big data
Crowd-sourced annotation datasets
The modern revolution in computer vision was unquestionably fueled by
the availability of massive annotated datasets. The most famous of all is
ImageNet, which eclipsed previous datasets with the number of images and
the accuracy and usefulness of the labels
... annotations fall into one of two categories: (1) image-level annotation of a binary label for the presence or absence of an object class in the image, e.g., "there are cars in this image" but "there are no tigers," and (2) object-level annotation of a tight bounding box and class label around an object instance in the image, e.g., "there is a screwdriver centered at position (20,25) with width of 50 pixels and height of 30 pixels".
In practice, ImageNet enabled object detection. The COCO dataset
similarly enabled pixel-wise instance-level
segmentation
Instance segmentation turns out to be an very good match for the perception needs we have in manipulation. In the last chapter we found ourselves with a bin full of YCB objects. If we want to pick out only the mustard bottles, and pick them out one at a time, then we can use a deep network to perform an initial instance-level segmentation of the scene, and then use our grasping strategies on only the segmented point cloud. Or if we do need to estimate the pose of an object (e.g. in order to place it in a desired pose), then segmenting the point cloud can also dramatically improve the chances of success with our geometric pose estimation algorithms.
Segmenting new classes via fine tuning
The ImageNet and COCO datasets contain labels for a variety of interesting classes, including cows, elephants, bears, zebras and giraffes. They have a few classes that are more relevant to manipulation (e.g., plates, forks, knives, and spoons), but they don't have a mustard bottle nor a can of potted meat like we have in the YCB dataset. So what are we do to? Must we produce the same image annotation tools and pay for people to label thousands of images for us?
One of the most amazing and magical properties of the deep architectures that have been working so well for instance-level segmentation is their ability to transfer to new tasks ("transfer learning"). A network that was pre-trained on a large dataset like ImageNet or COCO can be fine-tuned with a relatively much smaller amount of labeled data to a new set of classes that are relevant to our particular application. In fact, the architectures are often referred to as having a "backbone" and a "head" -- in order to train a new set of classes, it is often possible to just pop off the existing head and replace it with a new head for the new labels. A relatively small amount of training with a relatively small dataset can still achieve surprisingly robust performance. Moreover, it seems that training initially on the diverse dataset (ImageNet or COCO) is actually important to learn the robust perceptual representations that work for a broad class of perception tasks. Incredible!
This is great news! But we still need some amount of labeled data for our objects of interest. The last few years have seen a number of start-ups based purely on the business model of helping you get your dataset labeled. But thankfully, this isn't our only option.
Annotation tools for manipulation
Just as projects like LabelMe helped to streamline the process of
providing pixel-wise annotations for images downloaded from the web,
there are a number of tools that have been developed to streamline the
annotation process for robotics. One of the earliest examples was
LabelFusion, which combines geometric perception of point clouds
with a simple user interface to very rapidly label a large number of
images
In LabelFusion, the user provides multiple RGB-D images of a static
scene containing some objects of interest, and the CAD models for those
objects. LabelFusion uses a dense reconstruction algorithm,
ElasticFusion
Tools like LabelFusion can be use to label large numbers of images very quickly (three clicks from a user produces ground truth labels in many images).
Synthetic datasets
All of this real world data is incredibly valuable. But we have another super powerful tool at our disposal: simulation! Computer vision researchers have traditionally been very skeptical of training perception systems on synthetic images, but as game-engine quality physics-based rendering has become a commodity technology, roboticists have been using it aggressively to supplement or even replace their real-world datasets. The annual robotics conferences now feature regular workshops and/or debates on the topic of "sim2real". For any specific scene or narrow class of objects, we can typically generate accurate enough art assets (with material properties that are often still tuned by an artist) and environment maps / lighting conditions that rendered images can be highly effective in a training dataset. The bigger question is whether we can generate a diverse enough set of data with distributions representative of the real world to train robust feature detectors in the way that we've managed to train with ImageNet. But for many serious robotics groups, synthetic data generation pipelines have significantly augmented or even replaced real-world labeled data.
There is a subtle reason for this. Human annotations on real data,
although they can be quite good, are never perfect. Labeling errors can
put a ceiling on the total performance achievable by the learning
system
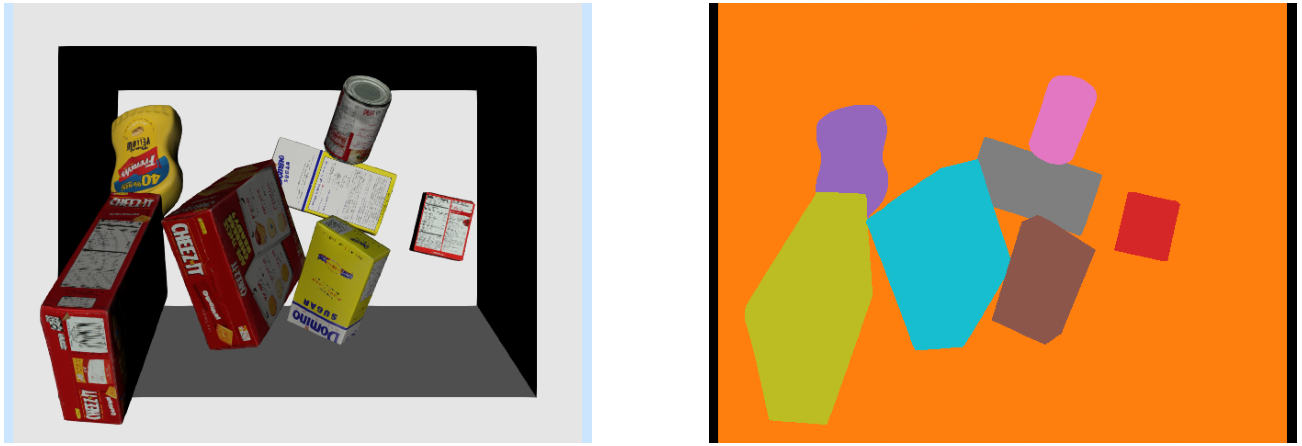
For the purposes of this chapter, I aim to train an instance-level segmentation system that will work well on our simulated images. For this use case, there is (almost) no debate! Leveraging the pre-trained backbone from COCO, I will use only synthetic data for fine tuning.
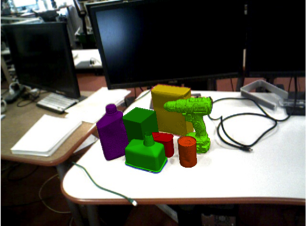
You may have noticed it already, but the RgbdSensor that we've been using in Drake actually has a "label image" output port that we haven't used yet.
This output port exists precisely to support the perception training use case we have here. It outputs an image that is identical to the RGB image, except that every pixel is "colored" with a unique instance-level identifier.
RgbdSensor. I've remapped the colors
to be more visually distinct.Generating training data for instance segmentation
I've provided a simple script that runs our "clutter generator" from our bin picking example that drops random YCB objects into the bin. After a short simulation, I render the RGB image and the label image, and save them (along with some metadata with the instance and class identifiers) to disk.
I've verified that this code can run on Colab, but to make a dataset of 10k images using this un-optimized process takes about an hour on my big development desktop. And curating the files is just easier if you run it locally. So I've provided this one as a python script instead.
You can also feel free to skip this step! I've uploaded the 10k images that I generated here. We'll download that directly in our training notebook.
Self-supervised learning
Even bigger datasets
With the rise of large language models (LLMs) came a very natural question: how do we obtain a "foundation model" for computer vision? This would be loosely defined as a model that had impressive zero-shot prediction performance on basically any new image, without prompting and a small number of interactions with a non-expert user replacing the need for fine-tuning on a domain-specific dataset.
Segment Anything
Object detection and segmentation
There is a lot to know about modern object detection and segmentation pipelines. I'll stick to the very basics.
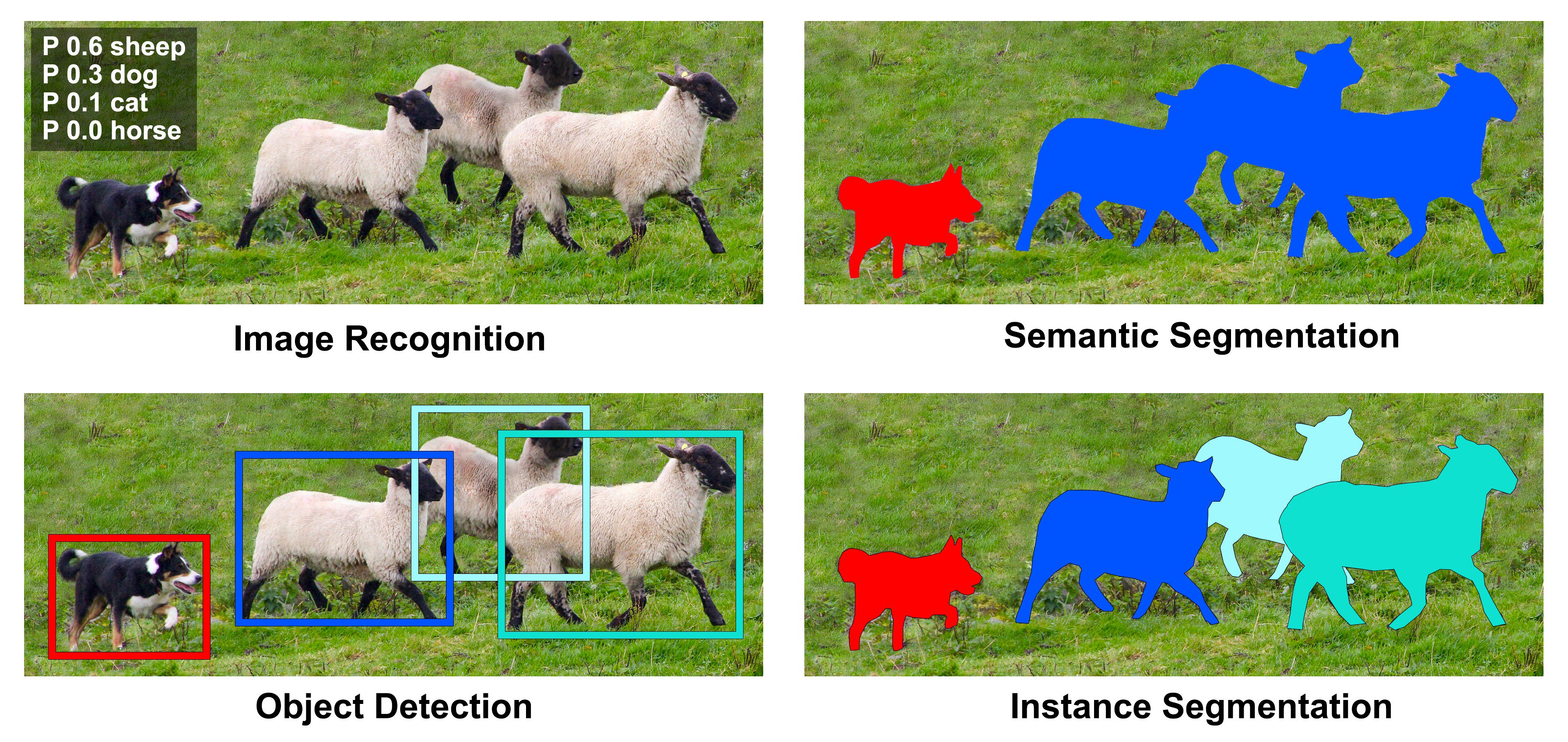
For image recognition (see Figure 1), one can imagine training a standard
convolutional network that takes the entire image as an input, and outputs a
probability of the image containing a sheep, a dog, etc. In fact, these
architectures can even work well for semantic segmentation, where the input
is an image and the output is another image; a famous architecture for this
is the Fully Convolutional Network (FCN)
The mainstream approach to this is to first break the input image up into
many (let's say on the order of 1000) overlapping regions that might
represent interesting sub-images. Then we can run our favorite image
recognition and/or segmentation network on each subimage individually, and
output a detection for each region that that is scored as having a high
probability. In order to output a tight bounding box, the detection
networks are also trained to output a "bounding box refinement" that selects
a subset of the final region for the bounding box. Originally, these region
proposals were done with more traditional image preprocessing algorithms, as
in R-CNN (Regions with CNN Features)
For instance segmentation, we will use the very popular Mask R-CNN
network which puts all of these ideas, using region proposal networks and a
fully convolutional networks for the object detection and for the masks
torchvision
package; we'll stick to the torchvision version for our
experiments here.
Fine-tuning Mask R-CNN for bin picking
The following notebook loads our 10k image dataset and a Mask R-CNN network pre-trained on the COCO dataset. It then replaces the head of the pre-trained network with a new head with the right number of outputs for our YCB recognition task, and then runs just a 10 epochs of training with my new dataset.
![]() (Training Notebook)
(Training Notebook)
Training a network this big (it will take about 150MB on disk) is not fast. I strongly recommend hitting play on the cell immediately after the training cell while you are watching it train so that the weights are saved and downloaded even if your Colab session closes. But when you're done, you should have a shiny new network for instance segmentation of the YCB objects in the bin!
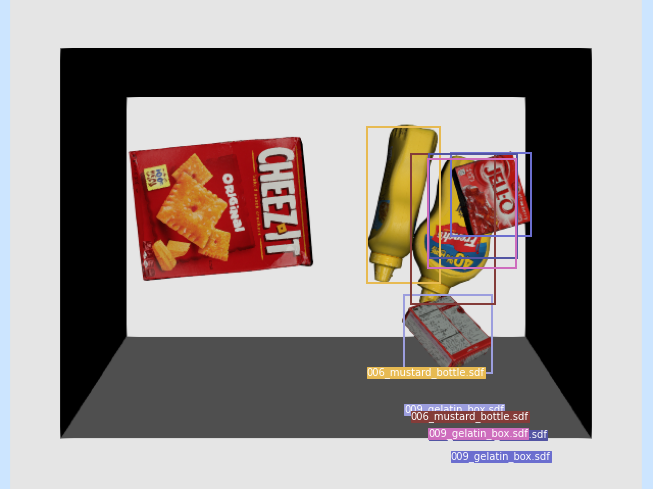
I've provided a second notebook that you can use to load and evaluate the trained model. If you don't want to wait for your own to train, you can examine the one that I've trained!
![]() (Inference Notebook)
(Inference Notebook)
Putting it all together
We can use our Mask R-CNN inference in a manipulation to do selective picking from the bin...
Variations and Extensions
Pretraining wth self-supervised learning
Leveraging large-scale models
One of the goals for these notes is to consider "open-world" manipulation -- making a manipulation pipeline that can perform useful tasks in previously unseen environments and with unseen models. How can we possibly provide labeled instances of every object the robot will ever have to manipulate?
The most dramatic examples of open-world reasoning have been coming
from the so-called "foundation models"
More coming soon...
Exercises
Label Generation
For this exericse, you will look into a simple trick to automatically generate training data for Mask-RCNN. You will work exclusively in . You will be asked to complete the following steps:
- Automatically generate mask labels from pre-processed point clouds.
- Analyze the applicability of the method for more complex scenes.
- Apply data augmentation techniques to generate more training data.
Segmentation + Antipodal Grasping
For this exercise, you will use Mask-RCNN and our previously developed antipodal grasp strategy to select a grasp given a point cloud. You will work exclusively in . You will be asked to complete the following steps:
- Automatically filter the point cloud for points that correspond to our intended grasped object
- Analyze the impact of a multi-camera setup.
- Consider why filtering the point clouds is a useful step in this grasping pipeline.
- Discuss how we could improve this grasping pipeline.
Vision-Language Segmentation
For this exercise, you will explore how Vision-Language Models (VLMs) and the Segment Anything Model (SAM) can be combined to achieve language-driven object segmentation. You will work exclusively in . You will be asked to complete the following steps:
- Analyze SAM's segmentation capabilities and understand its limitations in object identification
- Use a Vision-Language Model to generate bounding boxes from natural language prompts
- Combine VLM-generated bounding boxes with SAM to produce precise segmentation masks for specified objects